29/05/2025
Tóm tắt:
Nghị quyết số 57-NQ/TW ngày 22/12/2024 của Bộ Chính trị về đột phá phát triển khoa học, công nghệ, đổi mới sáng tạo và chuyển đổi số quốc gia đã đặt ra yêu cầu cấp bách về chuyển đổi số trong mọi mặt cuộc sống, trong đó có công tác nghiên cứu khoa học, quản lý biển và hải đảo. Bài viết mô tả tiềm năng phát triển kinh tế biển Việt Nam và khả năng ứng dụng các công nghệ biển mới. Trong bài có liệt kê phân loại các công nghệ phương tiện ngầm đo đạc khảo sát biển, thiết bị lặn biển ROV, công nghệ bơi lặn biển AUV. Bài báo có đề xuất dự kiến mô hình hợp tác công tư trong nghiên cứu tự chế tạo sản phẩm AUV tự hành lặn biển của Việt Nam phục vụ công tác quản lý không gian biển và nghiên cứu khoa học biển.
Từ khóa: Công nghệ biển mới, ROV, AUV, quản lý không gian biển, kinh tế biển, khoa học biển
Ngày nhận bài: 27/4/2025; Ngày sửa chữa: 26/4/2025; Ngày duyệt đăng: 15/5/2025.
New AUV technology in marine space management and marine scientific research
Abstract:
Resolution No. 57-NQ/TW dated December 22, 2024 of the Politburo on breakthroughs in science, technology, innovation and national digital transformation has urgently required digital transformation in all aspects of life, including scientific research, marine management. The article introduces the potential for Vietnam's marine economic development and the ability to apply new marine technologies. The article classifies marine survey and measurement underwater vehicle technologies, ROV and AUV diving technology. The article proposes a public-private partnership model in researching and manufacturing Vietnamese autonomous diving AUV products to serve the of marine space management and marine scientific research.
Keywords: New marine technology, ROV, AUV, marine spatial management, marine economy, marine science
JEL Classifications: Q22, Q28, Q55, O32.
1. ĐẶT VẤN ĐỀ
Việt Nam có hơn 3260 km bờ biển với hơn 3.000 hòn đảo, bãi đá ngầm lớn nhỏ, gần và xa bờ, có vùng nội thuỷ, lãnh hải, vùng đặc quyền kinh tế và thềm lục địa xác định gần gấp ba lần diện tích đất liền và khoảng trên 1 triệu km². Với 28 trong số 63 tỉnh/thành phố nước ta nằm ven biển, diện tích các huyện ven biển chiếm 17% tổng diện tích cả nước và là nơi sinh sống của hơn 1/5 dân số cả nước thì tiềm năng từ biển của nước ta là rất lớn. Kinh tế biển đóng vai trò quan trọng trong chiến lược phát triển bền vững của đất nước, góp phần thúc đẩy tăng trưởng kinh tế, tạo việc làm và BVMT [2].
Đảng và Nhà nước ta đã xác định trong Chiến lược biển Việt Nam, phải phấn đấu để nước ta trở thành một quốc gia mạnh về biển, giàu lên từ biển, bảo vệ vững chắc chủ quyền, quyền chủ quyền quốc gia trên biển, góp phần giữ vững ổn định và phát triển đất nước; kết hợp chặt chẽ giữa phát triển kinh tế - xã hội với đảm bảo quốc phòng, an ninh và BVMT; có chính sách hấp dẫn nhằm thu hút mọi nguồn lực cho phát triển kinh tế biển; xây dựng các trung tâm kinh tế lớn vùng duyên hải gắn với các hoạt động kinh tế biển làm động lực quan trọng đối với sự phát triển của cả nước. Phấn đấu để kinh tế biển đóng góp khoảng 53 - 55% GDP, 55 - 60% kim ngạch xuất khẩu của cả nước, giải quyết tốt các vấn đề xã hội, cải thiện một bước đáng kể đời sống của nhân dân vùng biển và ven biển. [2]
Việc ứng dụng các công nghệ mới như công nghệ tự vận hành ngầm dưới mặt biển (AUV), Trí tuệ nhân tạo (AI), Vệ tính viễn thám trong nghiên cứu khoa học biển và quản lý không gian biển là hướng chuyển đổi số hiện đại cần được ứng dụng và định hướng tự chủ công nghệ là rất cần thiết với Việt Nam [1]
2. Công nghệ số hóa trên biển
2.1. Phân loại và ứng dụng của phương tiện lặn không người lái
Trái đất có tới 70% diện tích bề mặt là nước, do đó việc tìm hiểu, nghiên cứu để khai thác, làm chủ nguồn tài nguyên các khu vực này luôn là khát khao của các quốc gia trên thế giới, đặc biệt là các nước giáp biển. Ngoài ra còn nhiều mục đích khác nhau như quân sự, phát triển kinh tế - xã hội... đã thúc đẩy việc thiết kế, chế tạo các thiết bị có khả năng hoạt động như những thiết bị lặn có người lái bên trong lần lượt được ra đời. Thế nhưng các thiết bị lặn có người lái đã đạt đến giới hạn của sự phát triển vào cuối những năm 1960 thế kỷ trước khi một số công ty quốc phòng như General Dynamics, Rockwell và Westinghouse đã phát triển khá hoàn chỉnh chúng. Từ mối quan tâm cho an toàn cho người điều khiển trong môi trường nước đến sự phát triển không ngừng của khoa học kỹ thuật đã dẫn đến ý tưởng cần phải nghiên cứu phát triển thêm những thiết bị lặn không có người lái bên trong. Hình 1 dưới đây phân loại các thiết bị, phương tiện thủy không người lái hoạt động trong môi trường nước.
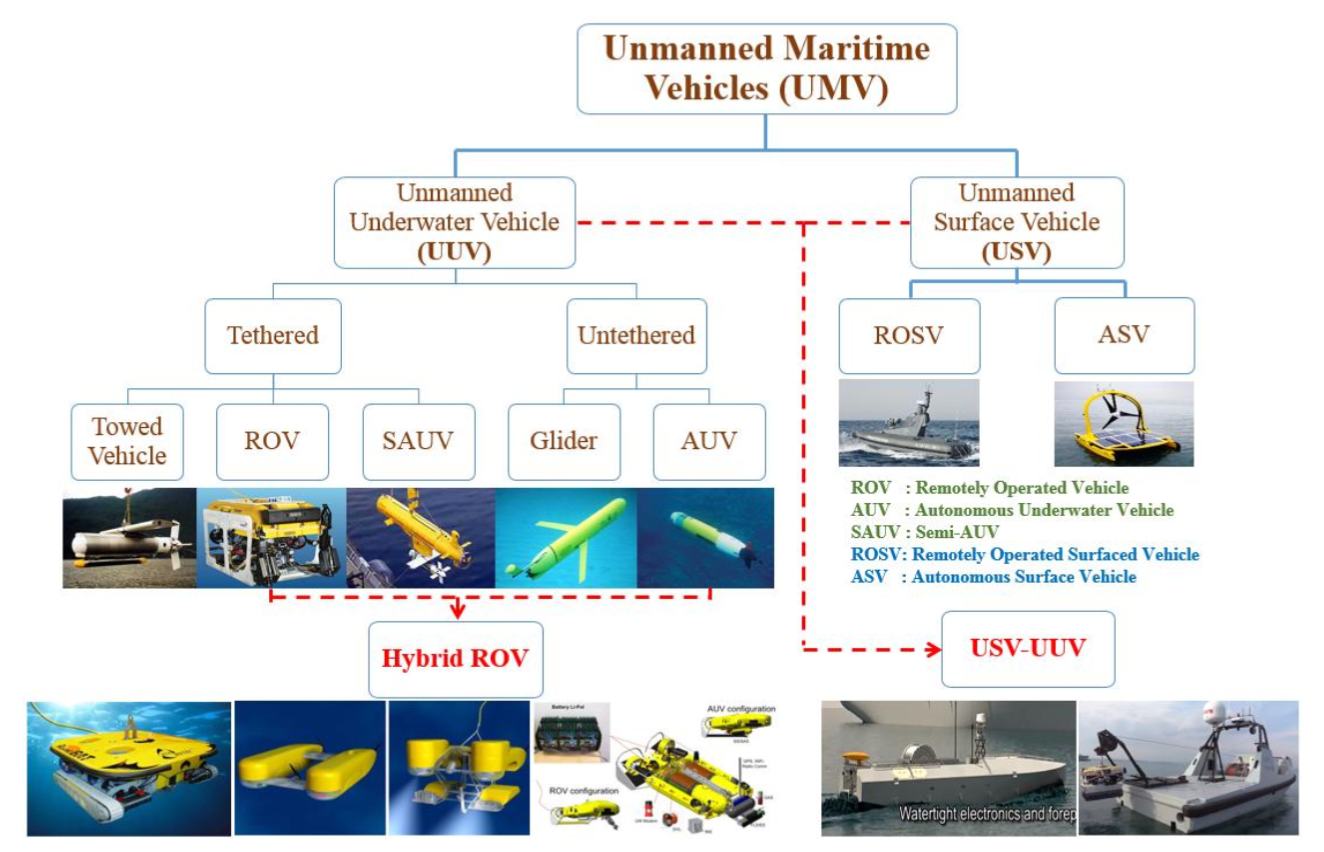
Hình 1. Phân loại thiết bị, phương tiện thủy không người lái [8]
Để giải quyết cho các vấn đề đòi hỏi phải hoạt động dưới nước trong thời gian dài và nguy hiểm cho con người như nghiên cứu đại dương, bảo trì công trình, tìm kiếm, trục vớt và khảo sát đáy biển hoặc tháo gỡ mìn, làm sạch khu vực nước tại các vùng chiến tranh đã được các nước phát triển trên thế giới như Anh, Đức, Mỹ, Nga, Nhật... sử dụng các thiết bị phương tiện thủy không người lái. Trong đó, thiếtệt bị lặn không người lái ROV (Remotely Operated Vehicle) được điều khiển từ xa bằng dây cáp và thiết bị tự hành không dây AUV (Autonomous Underwater Vehicle) là hay được sử dụng cho các tác vụ ngầm nhiều hơn cả. Phụ thuộcTùy vào đặc thù riêng củacho từng công việc, nhiệm vụ mà ROV hoặc AUV sẽ có ưu, nhược điểm hơn trong từng trường hợp cụ thể.
2.2. Thiết bị lặn không người lái ROV
Được phát triển vào những năm đầu 1950, những vấn đề kỹ thuật cho thiết bị lặn điều khiển từ xa bằng dây ROV đã được tính đến và bắt đầu thiết kế chế tạo đưa vào khai thác. Đến nay, những thiết bị ROV đã đóng vai trò chính, thay thế hầu hết các nhiệm vụ được giao cho những thiết bị lặn có người lái bên trong và hiện là thiết bị đáng tin cậy trong những thiết bị lặn dưới nước được chế tạo. Một số thiết bị ROV điển hình như thiết bị của Vviện Hhải dương học Wool Hole là công cụ chính được dùng để phát hiện xác của tàu Titanic hay trong sự cố tràn dầu ở vịnh Mexico năm 2010, một số lượng ROV đã được huy động sử dụng để ngăn sự rò rỉ dầu từ trong các ống nứt.
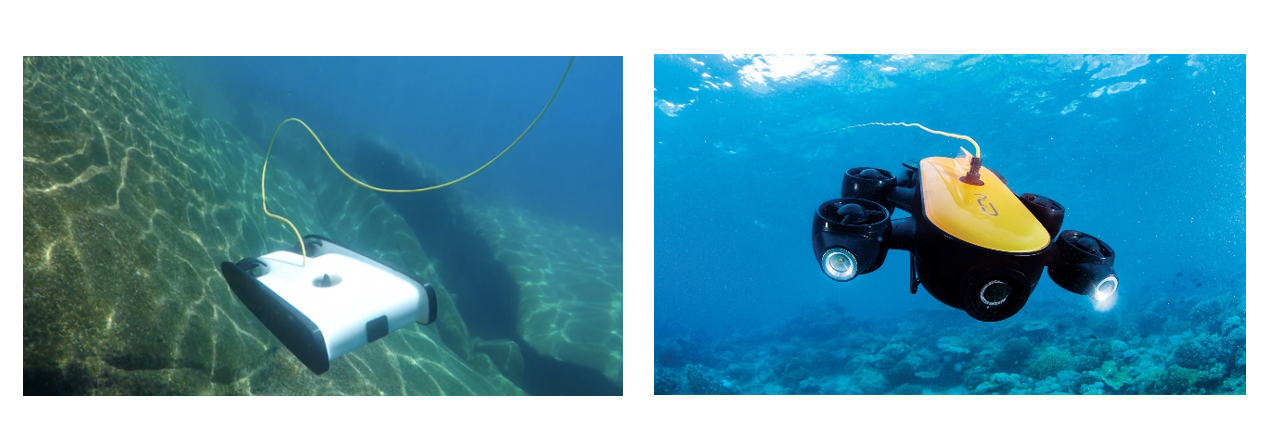
Hình 2. Thiết bị lặn không người lái ROV [8]
2.3. Phương tiện tự hành dưới nước AUV:
Phương tiện tự hành dưới nước AUV (Autonomous Underwater Vehicle) đã bắt đầu được nghiên cứu từ những năm 1970 để khắc phục các hạn chế của những thiết bị lặn có người lái bên trong và thiết bị lặn không người lái bên trong điều khiển bằng dây. Các thiết bị này có khả năng hoạt động trong nhiều dạng môi trường khác nhau từ sông ngòi, vùng biển đến các vùng lạnh giá khắc nghiệt ở hai đầu cực. Ngày nay, cùng với việc phát triển của các dạng vật liệu mới, kỹ thuật máy tính, thiết bị cảm biến, cũng như sự tiến bộ về lý thuyết điều khiển robot, hàng loạt các dạng AUV nhỏ gọn, tiên tiến, thông minh và đáng tin cậy đã được chế tạo và đưa vào ứng dụng trong thực tế như quan trắc môi trường, khảo sát địa hình, giám sát, hỗ trợ cứu hộ cứu nạn đường thủy, dò tìm vật thể kim loại dưới nước. Tuy nhiên AUV nói chung cũng không thể thay thế hoàn toàn ROV trong một số nhiệm vụ đặc thù vì mỗi thiết bị đều có lợi thế và nhược điểm riêng. Do đó ROV và AUV đều được áp dụng rộng rãi và quan tâm như nhau.
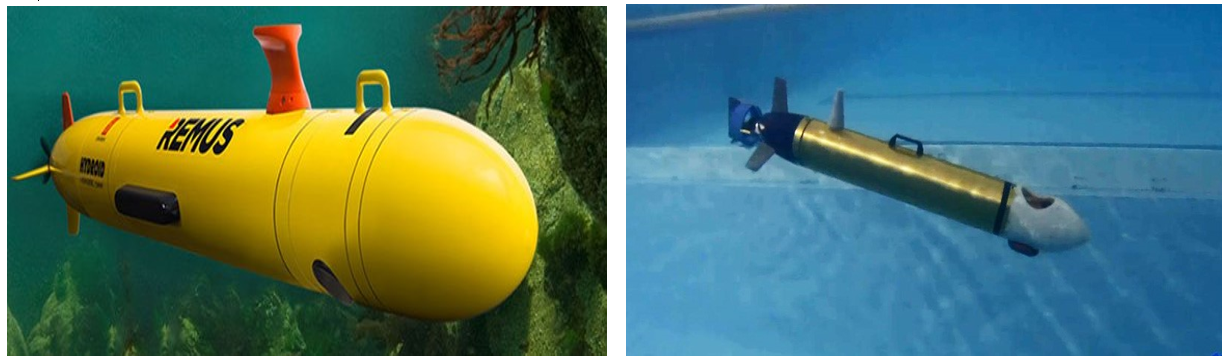
Hình 3. Phương tiện tự hành dưới nước AUV [8
3. Mô hình AUV phục vụ hỗ trợ quản lý biển ngầm và đo các thông số môi trường dưới nước trong nghiên cứu khoa học biển
Thiết kế hệ thống giao tiếp âm thanh kỹ thuật số để điều khiển AUV, thu thập dữ liệu... Phạm vi liên lạc dưới nước dự kiến lên đến 1 km, đảm bảo AUV hoạt động bình thường ở độ sâu lên đến 20m. Các kỹ thuật truyền thông sẽ được sử dụng là các phương pháp điều chế kỹ thuật số, bao gồm các kỹ thuật truyền cho phép tốc độ truyền cao.
Xây dựng hệ thống quét hình ảnh cho AUV sử dụng công nghệ SONAR. Hệ thống quét hình ảnh hướng đến sử dụng công nghệ ăng-ten mảng để tăng tốc độ xử lý dữ liệu song song. Kỹ thuật này hứa hẹn sẽ cung cấp hình ảnh quét chất lượng tốt, cho phép quan sát các vật thể dưới nước, cũng như quét đáy biển.
Phát triển hệ thống định vị phù hợp với AUV. Hệ thống định vị sử dụng sự phản xạ của sóng âm từ nhiều nguồn khác nhau để xác định vị trí của AUV trong điều kiện dưới nước. Khả năng định vị dưới nước cũng cho phép điều khiển lái AUV một cách an toàn và mượt hơn.
Xây dựng các mô hình điều khiển và điều khiển cho AUV bằng cách giải các phương trình động học và động học, xem xét cẩn thận các nhiệm vụ cụ thể và ràng buộc vật lý của chúng. Dựa trên các mô hình đó, một cơ chế ổn định sẽ được đưa ra để điều khiển chuyển động, lặn và nổi của AUV. Đồng thời, bộ điều khiển được lập trình động để giữ cho phương tiện cân bằng, ngay cả khi bị tác động bất lợi của nhiễu loạn nước.
Cuối cùng, để xây dựng một mẫu AUV hoàn chỉnh tích hợp các công nghệ tiên tiến nói trên, AUV được triển khai sẽ chứng minh tính khả thi của thiết kế hệ thống hướng đến phục vụ hỗ trợ và giám sát công việc dưới nước.
Công nghệ truyền thông âm thanh hiện nay đã được ứng dụng tương đối rộng rãi trong quân đội và dân sự. Nguyên lý cơ bản của công nghệ này là truyền tín hiệu âm thanh trong các kênh dưới nước với tần số dao động trong dải tần số âm thanh hoặc siêu âm. Hệ thống truyền thông âm thanh kỹ thuật số bao gồm một máy phát có "ăng-ten" phát và một máy thu được kết nối với một "ăng-ten" thu như trong Hình 1. Hệ thống "ăng-ten" được đề cập ở đây không thực sự là một ăng-ten thu phát như hệ thống liên lạc vô tuyến mặt đất, với sự lan truyền như sóng điện từ, mà là một hệ thống "ăng-ten" tạo ra các rung động cơ học. Những rung động này tạo ra tần số siêu âm có thể lan truyền trong các kênh dưới nước.
Các kênh âm thanh dưới nước được đặc trưng bởi độ suy giảm lớn, độ trễ truyền lớn, lan truyền đa đường và chịu nhiễu lớn. Do đó, để có thể truyền tín hiệu kỹ thuật số với tỷ lệ lỗi bit nhỏ (dưới 10-3) chúng ta cần một bộ mã hóa và một bộ giải mã để sửa tín hiệu nhận được. Bên cạnh đó, phía nhận cần được thiết kế bộ lọc tín hiệu nhận thích hợp để loại bỏ nhiễu.
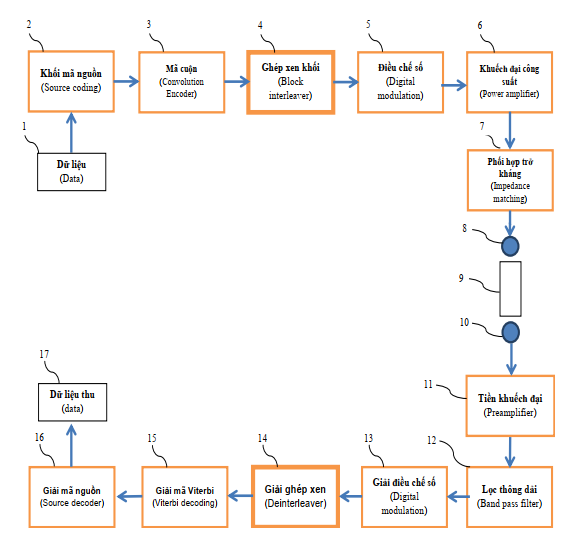
Hình 4. Sơ đồ tổng quan hệ thống thông tin liên lạc thủy âm kỹ thuật số [3]
Ngày nay, công nghệ xử lý tín hiệu kỹ thuật số DSP đã phát triển nhanh chóng. Do đó, các công nghệ xử lý tín hiệu hiện đại đã được áp dụng cho các hệ thống thông tin liên lạc dưới nước âm thanh kỹ thuật số. Cụ thể, kỹ thuật Orthogonal Frequency Division Mutiplexing (OFDM) được kết hợp với công nghệ Multiple Input and Output (MIMO). Kết quả là, khả năng âm thanh dưới nước được tăng lên đáng kể. Dự án này nhằm mục đích thiết kế một hệ thống MIMO-OFDM cho thông tin liên lạc dưới nước, hứa hẹn truyền các dịch vụ đa phương tiện dưới nước với chất lượng cao và ở khoảng cách xa. Hơn nữa, dựa trên công việc nghiên cứu được đưa ra trong [4, 5], dự án này đã lên kế hoạch triển khai hệ thống liên lạc âm thanh kỹ thuật số dưới nước trên DSP và các bo mạch nhúng, để hệ thống được vận hành trong thời gian thực, đáp ứng nhu cầu của bộ điều khiển AUV trong thời gian thực.
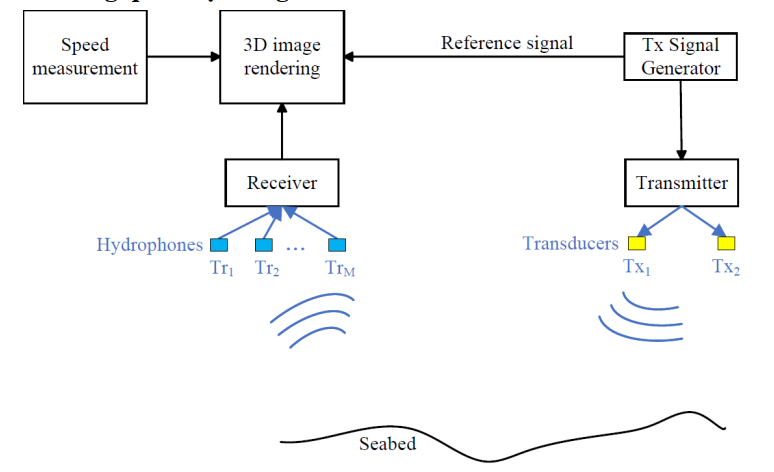
Hình 5. Cấu trúc khối của quét SONAR hình ảnh 3D [4]
Ứng dụng của công nghệ SONAR (định vị và dẫn đường bằng thủy âm) được tìm thấy trong nhiều lĩnh vực, chẳng hạn như phân loại đáy biển đánh bắt hải sản [4], khảo cổ học, giám sát đường ống dưới nước [7,8]. Trong dự án này sẽ hướng đến mục đích phát triển một hệ thống quét SONAR hình ảnh để hỗ trợ hoạt động của AUV trong các điều kiện dưới nước.
Cách thức tiến hành nghiên cứu:
AUV là một cỗ máy tinh vi có thiết kế tốn kém về tài chính, thời gian và nhân lực. Liên lạc cho phương tiện tự hành dưới nước cũng phi truyền thống, vì nước chống lại sự lan truyền của sóng điện từ mạnh mẽ. Do đó, nhóm tác giả linh hoạt kết hợp nhiều chiến lược để hiện thực hóa sản phẩm mục tiêu.
Mô hình hóa hệ thống toàn diện và các thành phần của nó, liên quan đến các yếu tố cơ học, phương tiện truyền thông và các tác nhân giám sát và điều khiển thời gian thực. Các mô hình kết quả bao gồm cả đối tượng ảo và vật lý hữu ích cho các bước điều tra tiếp theo. Trong giai đoạn đầu của dự án, nhóm tác giả sẽ xây dựng một mô hình cơ học có mục đích chung cho phép nghiên cứu các thuật toán khác nhau để điều khiển và cân bằng. Nó đủ mở để thay đổi hình học và cơ học. Trên thực tế, mô hình vật lý sẽ được phát triển từ mẫu phương tiện lai ROV-AUV (phương tiện không người lái dưới nước kết hợp điều khiển từ xa qua dây cáp và sóng vô tuyến điện hiện có của nhóm tác giả). Trong khi đó, các đối tượng ảo sẽ được lập trình trên nền tảng đồ họa và các công cụ mô hình nhúng khác.
Mô phỏng các chức năng và quy trình thủy động lực, tính toán và giao tiếp bằng và với sự hỗ trợ của các công cụ máy tính. Mô phỏng phần mềm trong vòng lặp sẽ giúp đánh giá và xác minh kỹ lưỡng tính đúng đắn và kịp thời của hành vi hệ thống cũng như hoạt động AUV. Các mô phỏng giúp nhóm tác giả nghiên cứu hiệu quả tác động của các yếu tố môi trường đối với chuyển động của AUV và hiệu suất giao tiếp. Ngoài ra, các công cụ trực quan cũng sẽ được sử dụng để giải quyết vấn đề tìm đường và tránh chướng ngại vật. Về vấn đề lái và điều hướng, các mô phỏng tính toán chuyên sâu được kỳ vọng sẽ giúp vừa tính toán các tham số hình học vừa giải quyết vấn đề động học và động lực.
Tiến hành các nghiên cứu thực nghiệm dựa trên các mô hình nói trên để thu thập dữ liệu sơ bộ rất quan trọng trong việc thúc đẩy các bước tiếp theo của nghiên cứu và phát triển. Việc triển khai mẫu phương tiện lai ROV-AUV hiện có sẽ cung cấp dữ liệu đầu vào quan trọng cho việc khảo sát lái, định vị và thông tin liên lạc. Kết hợp với mô phỏng, việc triển khai thử nghiệm cho phép nhóm tác giả thiết lập và điều chỉnh các mô hình được thiết kế trong các giai đoạn khác nhau của quá trình nghiên cứu và phát triển. Đồng thời, các bản sao kỹ thuật số được lập trình của các thành phần phức tạp trên bo mạch giúp dễ dàng xác minh sự tương tác của chúng trong thời gian thực.
Sử dụng các công nghệ tiên tiến trong việc thực hiện các chức năng chính: ăng-ten mảng, hình ảnh sonar, bản sao kỹ thuật số…, v.v. Việc xây dựng IoT dưới nước chưa bao giờ đơn giản, vì có rất nhiều thách thức phát sinh từ môi trường bất lợi. Nước tự nhiên chống lại chuyển động của bất kỳ máy móc nào và không để sóng điện từ lan truyền dễ dàng trong đó. Điều này mong muốn các giải pháp phân biệt để đảm bảo hoạt động bình thường của máy móc dưới nước từ các quan điểm giao tiếp, tính toán và điều khiển. Nhóm tác giả nghiên cứu cẩn thận khả năng ứng dụng của các công nghệ nói trên, đầu tiên bằng mô phỏng, sau đó bằng thử nghiệm cấp độ thành phần riêng lẻ và cuối cùng là trên toàn hệ thống.
Kế thừa các kết quả nghiên cứu trong quá khứ của nhóm tác giả và các nghiên cứu liên quan hiện có. Nhóm nghiên cứu đã thành công trong một số dự án về truyền thông SONAR trước đây. Điều này mang lại một khởi đầu thuận lợi khi nhóm tác giả thiết kế và phát triển các phương tiện truyền thông cho AUV sắp tới. Đồng thời, nhóm tác giả cũng đã xây dựng một mẫu AUV để sẵn sàng tích hợp các phương án điều khiển lái và điều hướng sáng tạo. Nhóm tác giả đang tìm cách lắp ráp các thiết bị điện tử trên bo mạch tự thiết kế của mình để sớm khởi động các thử nghiệm trên thực địa cho AUV, theo đó các chức năng định vị và giao tiếp có thể được thử nghiệm trong các tình huống thực tế hơn.
Về mặt kỹ thuật, có rất nhiều thách thức khác nhau trong việc chế tạo AUV và điều khiển chúng dưới nước. Trong khuôn khổ của dự án này, chúng tôi cố gắng giải quyết các vấn đề bằng cách áp dụng các công nghệ mới tiên tiến trong thiết kế, mô phỏng và phát triển sản phẩm mục tiêu. Những đổi mới cần được nhấn mạnh nằm ở: (1) Độ kín nước; (2) Ăng-ten mảng; (3) Định vị dựa trên công nghệ SONAR; (3) Cơ chế tự lái; (4) Bản sao kỹ thuật số; (5) Xử lý thời gian thực.
Độ kín nước: Điều quan trọng là mọi máy dưới nước phải được đóng gói chặt chẽ để các cấu trúc bên trong hoạt động bình thường. Đối với AUV, điều này thậm chí còn khó khăn hơn vì các phương tiện chứa rất nhiều vật dụng nhạy cảm với nước, từ các yếu tố cơ khí có độ chính xác cao đến thiết bị điện tử tinh vi. Trong dự án này, các khía cạnh của thiết kế thân tàu và vật liệu sẽ được nghiên cứu chuyên sâu để cải thiện khả năng chống nước và độ bền trong khi máy móc hoạt động dưới nước liên tục trong nhiều giờ.
Cơ chế cân bằng và lái khớp: Để giải quyết vấn đề cân bằng và điều khiển AUV, các mô hình động học và động lực học sẽ được cùng xây dựng. Giải pháp của nó theo đó đưa ra công thức để điều khiển máy móc, điều khiển lặn, nổi và di chuyển tiến / lùi. Sau đó, chúng tôi thiết kế một mô-đun điều khiển trung tâm đưa ra quyết định chỉ đạo khi phân tích tất cả dữ liệu thu thập được từ môi trường xung quanh và tính toán các thông số quỹ đạo.
Ăng-ten mảng để xử lý tín hiệu song song: Vì ánh sáng nhìn thấy không thể lan truyền xa dưới nước, camera quang học thực tế không giúp ích gì trong việc giám sát video. Thật vậy, chỉ có sóng âm thanh mới có thể được sử dụng để chụp những hình ảnh đủ tốt về môi trường xung quanh. Chúng tôi đề xuất kết hợp nhiều bộ thu phát để truyền tín hiệu sóng âm thanh. Các sóng nhận được sau đó được đưa qua các đường ống xử lý song song, cho hình ảnh trung thực hơn.
Định vị và điều hướng dựa trên SONAR: Khi AUV di chuyển dưới nước, bất kỳ hệ thống định vị dựa trên vệ tinh nào cũng không hoạt động, điều này đặt ra những thách thức đáng kể đối với vấn đề giám sát, điều hướng và điều khiển máy móc. Trên thực tế, sonar là phương tiện duy nhất để giải quyết vấn đề, cũng như truyền tải thông tin giữa các phương tiện dưới nước và trạm mặt nước.
Hình ảnh quét SONAR: Ánh sáng nhìn thấy thực tế không thể truyền xa qua nước. Do đó, công nghệ quét sonar được sử dụng thay thế. Các kỹ thuật chụp ảnh quét bên tiên tiến sẽ được nghiên cứu để chụp ảnh chất lượng tốt để tìm hiểu địa hình đáy biển và phát hiện chướng ngại vật. Phân tích hình ảnh rời rạc giúp người vận hành hệ thống thoải mái giám sát các máy móc dưới nước. Nó cũng cho phép ghi lại trực quan các hoạt động của họ để xem xét sau hành trình.
Tổng hợp giao diện bản sao kỹ thuật số: Giám sát và điều khiển từ xa AUV cần một giao diện tiện dụng cho phép người vận hành điều khiển máy móc trong thời gian thực. Nhóm dự án có kế hoạch tích hợp các cảm biến vào AUV, báo cáo dữ liệu thời gian thực cho trạm bề mặt. Đồng thời, chúng tôi cũng xây dựng một kênh liên lạc dưới nước cho các thiết bị truyền động nhúng để nhận lệnh điều khiển. Do đó, một hệ thống IoT hỗn hợp dưới nước - bề mặt được hình thành để thực hiện các chức năng giám sát và điều khiển. Dựa trên dữ liệu thu thập được, các đối tượng ảo đại diện cho các bộ phận của máy được xây dựng, cho phép các hoạt động tương tác từ trạm điều khiển.
Xử lý điện toán biên theo thời gian thực và giảm tải tác vụ động: Do băng thông liên lạc của các kênh sonar rất hạn chế, một AUV đang hoạt động không thể cho phép các tác vụ tính toán được giảm tải phần lớn sang một đám mây tháo vát hoặc cổng ngoài khơi. Hình ảnh quét và xử lý dữ liệu cảm biến chủ yếu phải được xử lý cục bộ trước khi đưa ra quyết định kiểm soát và chỉ đạo. Do đó, chúng tôi đề xuất một cơ chế giảm tải tác vụ nhận biết tải tính toán. Cụ thể, các nhiệm vụ kiểm soát quan trọng về thời gian như lái, tránh chướng ngại vật, được thực hiện tại chỗ, trong khi khối lượng công việc ít nhạy cảm hơn về thời gian và tính toán như vẽ bản đồ đáy biển, tìm đường dài hạn sẽ được giảm tải toàn bộ hoặc một phần.
3. Đề xuất và kiến nghị:
Nhóm tác giả đề xuất một số cơ chế giảm tải tác vụ nhận biết tính toán, cụ thể:
- Xây dựng danh mục có các công nghệ biển mới có thể tự làm chủ chế tạo và sản xuất tại Việt Nam như AUV, ROV;
- Hợp tác với các Quỹ KHCN quốc tế, tư nhân và trong nước như NAFOSTED, VINIF, WB… Hỗ trợ cho chính sách tài chính phục vụ chuyển đổi số trong lĩnh vực KHCN biển;
- Xây dựng các chương trình KHCN Đại dương thông minh – Đại dương số đến năm 2030 tầm nhìn đến 2050;
- Đào tạo nguồn nhân lực công nghệ số cho KHCN biển;
- Hợp tác, đào tạo và chuyển giao công nghệ biển mới từ các cường quốc biển như Mỹ, Nhật, Hàn, EU, Nga, Trung....
Nguyễn Văn Đức1, Phan Anh Tuấn1, Dư Văn Toán2
1Đại học Bách khoa Hà Nội
2Viện khoa học môi trường, biển và hải đảo
(Nguồn: Bài đăng trên Tạp chí Môi trường, số 5/2025)
TÀI LIỆU THAM KHẢO
Nghị quyết số 57-NQ/TW ngày 22/12/2024 của Bộ Chính trị về đột phá phát triển khoa học, công nghệ, đổi mới sáng tạo và chuyển đổi số quốc gia.
Nghị quyết số 36-NQ/TW ngày 22/10/2018 về “Chiến lược phát triển bền vững kinh tế biển Việt Nam đến năm 2030, tầm nhìn đến năm 2045”.
Duc Nguyen Van, “Quy trình thiết kế hệ thông thông tin thủy âm không dây sử dụng phương pháp điều chế FSK”, (1-2012-03115), 2012.
Duc Nguyen Van, “Phương pháp lực chọn tham số bo bộ ghép xen kết hợp với mã cuộn và giải mã Viterbi cho hệ thống thông tin thủy âm” (1-1012-03018), 2012.
Phan Anh Tuấn, “Nghiên cứu và Phát triển phương tiện dưới nước mini”, Đề tài thuộc Dự án JICA-AUN/SEED Net, thời gian thực hiện: 2012-2013.
Nguyễn Văn Đức, Đề tài NCKH cơ bản Nafosted, “Xây dựng mô hình kênh truyền và các phương pháp phỏng tạo kênh cho hệ thống thông tin thủy âm”, thời gian thực hiện: 2013-2014.
Duc Nguyen Van, “Mạng cảm ứng thông tin dưới nước”, Thông tin Và Định vị vì sự Phát triển Kinh Tế Biển Việt Nam (ComNaVi-07), trang 53-56, Hà Nội 2007.
Duy Anh Nguyễn, Quang Hưng Cao, Phùng Hùng Nguyễn, “Nghiên cứu, thiết kế và điều khiển phương tiện dưới nước điều khiển từ xa”, Hội nghị quốc tế lần thứ 5 về Khoa học Ứng dụng, Kỹ thuật và Công nghệ, ĐHBK TP HCM, Việt Nam 2016.